
Оперативно-тактическая ракета Pershing-1 предназначалась для использования в интересах крупных войсковых соединений для стрельбы по городам, аэродромам, военно-полевым складам, скоплениям войск и пусковым установкам противника. Разработана для замены ракеты Red stone аналогичного назначения.
Головной разработчик - компания Martin Marietta (США г. Орландо, штат Флорида).
Стендовые испытания ракеты Pershing-1 начались в конце 1958 г, летные - в феврале 1960 г. В апреле 1963 г. поступила на войсковые испытания в батарею "А" 2-го дивизиона 44-го артиллерийского полка армии США.
Сразу после принятия на вооружение ракет Pershing, командование сухопутных войск США приступило к их модернизации и совершенствованию организационной структуры ракетных подразделений. Главной задачей модернизации было снижение уязвимости ракетного комплекса за счет повышения его мобильности, транспортабельности и боеготовности в целом. Усовершенствованный ракетный комплекс получил наименование Pershing-1А. Программа разработки Pershing-1А была одобрена в 1965 году, в 1969 году ракета была принята на вооружение. Pershing-1А заменила Pershing-1, которая производилась с 1964 по 1969 год. Высокая мобильность комплекса была достигнута благодаря расположению всех его элементов на колесных машинах, а боеготовность повысилась за счет совершенствования проверочно-пускового и стартового оборудования комплекса и автоматизации подготовки и пуска ракет.
В 1984 году на вооружение армии США начал поступать модернизированный комплекс Pershing-2, отличающийся увеличенной дальностью и точностью стрельбы.
Последние образцы ракетных комплексов Pershing-1А были уничтожены в 1989 году в соответствии с договором между СССР и США о ликвидации ракет средней и меньшей дальности (РСМД).

Ракета и наземное оборудование системы Pershing-1А транспортируются на грузовом полуприцепе, который буксируется колесным тягачом и на трех автомобилях SM - 274 (XM - 274) повышенной проходимости(см. состав комплекса). На платформе полуприцепа размещены стартовый стол, установщик с ракетой (обе ступени и приборный отсек) и головная часть ракеты, полностью готовая к стыковке с ракетой. На одном автомобиле SM - 274 смонтирован командный пункт огневой батареи, на другом - силовая установка и станция предстартовой проверки и управления пуском и на третьем - радиостанция с установкой электропитания. Радиостанция снабжена двумя антеннами - надувной параболической и выдвижной телескопической.
Стартовый агрегат системы Pershing-1А вместе с ракетой аэротранспортабелен, он может перебрасываться по воздуху военно-транспортными самолетами С-130 и более крупными транспортными самолетами других типов.
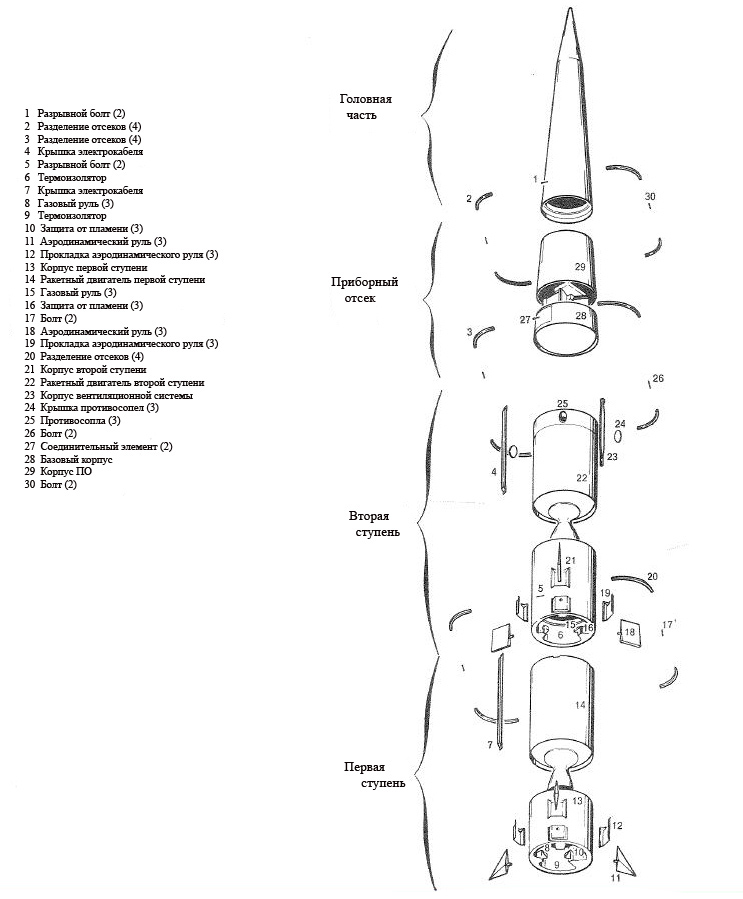
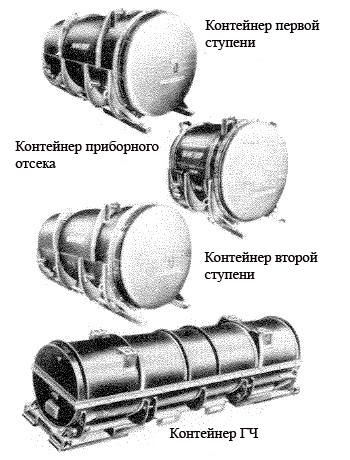
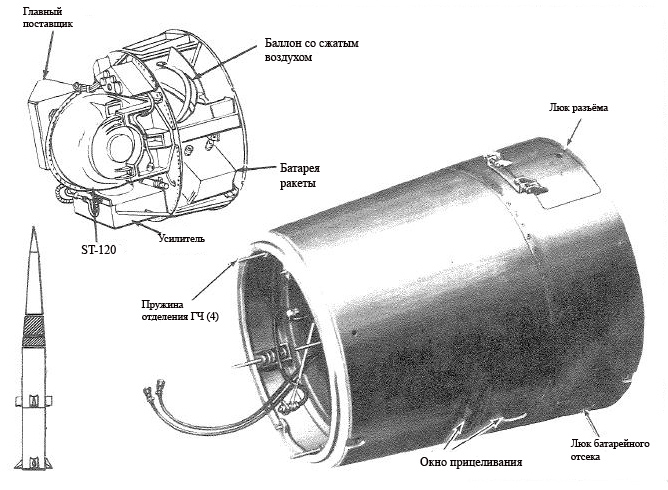
Структурно и функционально ракета cостоит из 4 отсеков: головная часть, приборный отсек, двигатель второй ступени, двигатель первой ступени. Каждый отсек имел свой контейнер для хранения и перевозки (см. схему)
Полезная нагрузка - моноблочная ядерная боевая часть (мощностью 60, 200 или 400 кт) размещена в головной части второй ступени. Форма конусообразная, длина 3.9 м., диаметр 0.72 м.
Корпус головной части был выполнен на алюминиевом основании, имел теплозащитную пластиковую оболочку переменной толщины. Пластиковая оболочка была покрыта случайно ориентированными лентами асбеста с пропиткой, соединёнными в однородную структуру под воздействием температур и высокого давления. Переменная толщина оболочки была выбрана таким образом, чтобы находиться в соответствии с показателями абляции, испытываемой головной частью при возвращении в атмосферу, когда на неё действуют высокие температуры.
Соединение головной частью и приборного отсека было осуществлено при помощи шпангоута, имеющего разрывной болт.
Приборный отсек стрингерно-шпангоутного типа имеет вид усеченного конуса, на каркасе размещена бортовая аппаратура (см. схему) . Дно отсека - съёмное для обеспечения доступа к аппаратуре СУ и возможности её монтажа. На боковой поверхности расположено окно прицеливания, выполненное из оптически прозрачного материала, которое необходимо для прицеливания ракеты перед пуском. Приборный отсек содержит: измерительный блок-гиростабилизированную платформу ST-120, бортовое цифровое вычислительное устройство, усилительно-преобразовательную аппаратуру и источник питания. Также там находились баллон со сжатым воздухом и система подачи воздуха высокого давления.
В системе управления платформа ST-120 обеспечивала получение информации о скорости ракеты и её положении, исходя из этих данных бортовой компьютер вычислял отклонения от заданной траектории и формировал управляющие сигналы. Команды могли быть разложены на отдельные управляющие элементы (газовые и аэродинамические рули).
Бортовыми источниками электроэнергии служат аккумуляторная батарея и вращающийся преобразователь мощностью 0.75 кВт.
Двигатель второй ступени состоял из корпуса, соединительного отсека и кормовой части. Корпус двигателя был выполнен из высокопрочной стали марки D6AC. Соединительный отсек в передней части корпуса использовался для стыковки к приборному отсеку.
Двигатель первой ступени M-105 имел аналогичную конструкцию, но отличался большей размерностью.
Отличие второй ступени от первой заключалось в наличии на второй ступени системы управления импульсом, которая состояла из трёх элементов, расположенных через 120° друг от друга. Данная система позволяла уменьшить тягу второй ступени в заданный момент времени и обеспечивала эффективное отделение головной части.
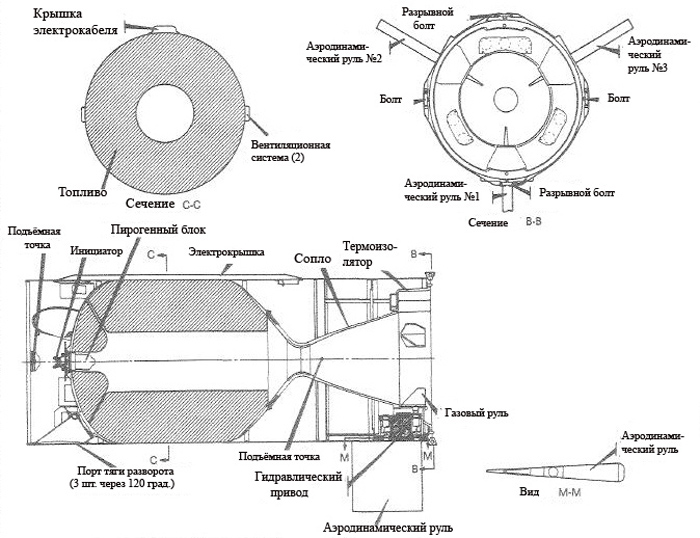
Система вентиляции содержала два фиксатора заряда, которые были закреплены на внешней горизонтальной осевой линии второй ступени. В корпусе и топливе делались два прямоугольных отверстия сразу за системой управления импульсом, что позволяло продуктам сгорания топлива выходить в окружающую среду, тем самым уменьшалось влияние работы двигателя второй ступени на головную часть.
Кормовая часть двигателя включала три газовых руля, три аэродинамических руля, три гидравлических привода и экран от воспламенения.
Заряд твердого топлива был выполнен из алюминиевой пудры в качестве горючего, перхлората аммония в качестве окислителя и полибутадиена (по сути, искусственный каучук) в качестве связующего и горючего. Обозначение PBAA/AP/Al. Состав заряда обеспечивал длительное хранение. Горение проходило по внутреннему каналу цилиндрической формы. Топливо было разработано фирмой «Thiokol».
Зажигание двигателя происходило от пирогенного блока, который, в свою очередь, поджигался при помощи инициаторов и небольшого пиротехнического заряда. Пирогенный блок представлял собой миниатюрный ракетный двигатель, продукты сгорания которого проходили в камеру сгорания двигателя и таким образом разогревали топливо ступеней до температуры, при которой оно начинало гореть.
Сопло двигателя второй ступени имело средний коэффициент расширения 15.06, оно было выполнено из стальных колец с оболочкой из стекловолокна.
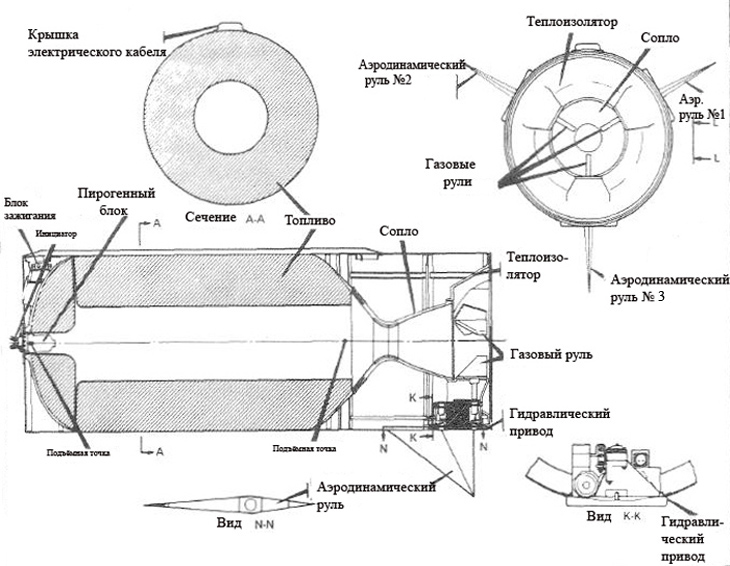
Твердотопливный двигатель первой ступени M-105 представляет собой легкий стальной корпус с зарядом топлива (на основе полиуретана) весом около 2450 кг, воспламенителем и соплом. Конструкционные материалы, состав топлива и решения по двигателю первой ступени практически полностью совпадали с конструкцией двигателя второй ступени. Сопло со средним коэффициентом расширения 7.06, было изготовлено по технологии, аналогичной соплу двигателя второй ступени.
Серийное производство корпусов двигателей обоих ступеней осуществляла фирма International Manufactoring.
В ракете используется инерциальная система управления "Бендикс" (автономная), снабженная гироскопами с двумя степенями свободы на газовых подшипниках. Ее функция состоит в сравнении заранее рассчитанной программной траектории с фактической траекторией, определяемой в полете с учетом текущих координат, и выработке соответствующих управляющих сигналов наведения.
Исполнительные органы системы управления - аэродинамические рули в комбинации с газовыми рулями. Каждая пара воздушных и газовых рулей работает от одного гидравлического привода. Ракета снабжена 4-мя аэродинамическими рулями, расположенными в плоскостях стабилизации. Оси вращения рулей перпендикулярны оси ракеты. Рули II-IV связаны друг с другом. При их совместном отклонении возникает сила, которая управляет движением ракеты по тангажу. Рули I-III используются для управления полётом по курсу и крену, работая в первом случае синхронно, во втором - в разные стороны.
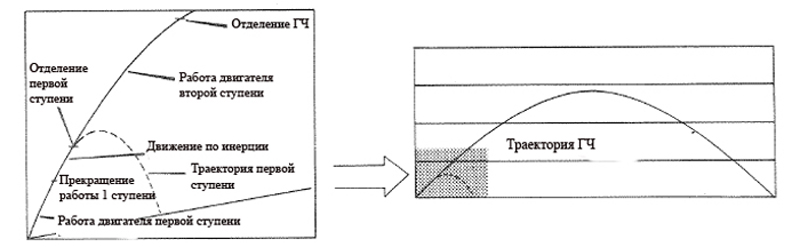
При отрыве от стартового стола управление ракетой передаётся на инерциальную систему управления, при этом связь с огневой позицией не поддерживается. Первая ступень отделяется на высоте 12 км, по достижении заданной скорости, путём мгновенного понижения давления в камере сгорания (см. схему). В момент отделения двигателя первой ступени запускается двигатель второй ступени. Период работы двигателя второй ступени ракеты бывает различным и зависит от дальности расположения цели. При достижении соответствующей скорости полёта и местоположения ракеты в пространстве головная часть отделяется от второй ступени и продолжает полёт к цели по баллистической траектории.
| Дальность действия, км | 185 - 740 |

За основную организационную единицу ракетного комплекса Pershing-1А был принят дивизион, в котором имеются 4 огневые батареи (9ПУ в каждой), а также штабная батарея и батарея обслуживания. Численность личного состава 1368 человек.
В американских сухопутных войсках были созданы 4 дивизиона Pershing-1А, 3 из которых постоянно размещались в ФРГ и входили в 56-ю бригаду со штабом в Швебиш-Гмюнд ( 55 км восточнее города Штутгард). 1-ый дивизион 41-го артполка дислоцировался также в Швебиш-Гмюнд, 1-ый дивизион 81-го артполка - в Нёй-Ульм, 3-й дивизион 84-го артполка -в населённых пунктах Неккарзульм и Хейльбронн, 3-й дивизион 9-го артполка - в Форт-Силл (штат Оклахома, США).
Всего в 56-ой бригаде насчитывалось 108 ПУ управляемых ракет Pershing-1А. До конца 1983года они являлись одним из основных оперативно-тактических средств армии США для нанесения ядерных ударов в интересах ОВС НАТО на Европейском театре военных действий.
- Pershing 1A System Description, Martin Marietta Aerospace
- "Зарубежное военное обозрение" №7(с.17-20), 1985; №6(с.48-50) , 1973.
- "Техника вооружения за рубежом" №16(с.1-2) , 1969;№3(с.5) , 1975; №15(с.1-5) , 1969; №15(с.2) , 1972; №16(с.1-3) , 1967.
- "Военная авиация и ракетная техника" №5(с.21-22),1964; вып.21(с.6-11), 1963;№19(с.10-12), 1961.
- "Военная техника" №7(с.21-24), 1962; №20(с.11-12), 1961; №20(с.11-12) , 1961.
- "Техника и вооружение сухопутных войск капиталистических государств" №1(с.3) , 1985; №14, 1976.
-
"Техника и вооружение" №5(с.83-85) , 1961.





{kind=link}
{kind=link}
{kind=link}