
В начале 1956 года президент США Д. Эйзенхауэр одобрил планы создания морской стратегической ракетно-ядерной системы. При этом предусматривалось, что реализация всей программы будет проводиться в несколько этапов с наращиванием боевых возможностей как ракет, так и их носителей.
Первоначально ракету для подводных лодок предполагалось создать на базе БРСД "Юпитер", работы над которой в то время велись полным ходом, но без видимого успеха. Это могло сорвать своевременное выполнение планов первого этапа. К тому же специалисты флота посчитали наличие на лодке ракет с взрывоопасными компонентами жидкого топлива чрезмерным риском. Поэтому руководство министерства ВМС обратилось в Министерство обороны США за разрешением самостоятельно разрабатывать ракету для флота. Учитывая сложности с разработкой ЖРД вообще и для ракет подводных лодок в частности, ставку сразу сделали на ракетные двигатели на твердом топливе (РДТТ), технология производства которых к 1957 году была уже отработана. Параллельно шли работы над проектом атомной подводной лодки - носителем ракетно-ядерного оружия.
В 1956 году были заключены контракты с фирмой "Lockheed Martin" на разработку эскизного проекта ракеты и на создание двигателей для нее - с фирмой "Aerojet-General" . К концу этого года были выработаны тактико-технические требования к системе, установлены оптимальные размеры подводной лодки, ее ракетного отсека и ракеты.
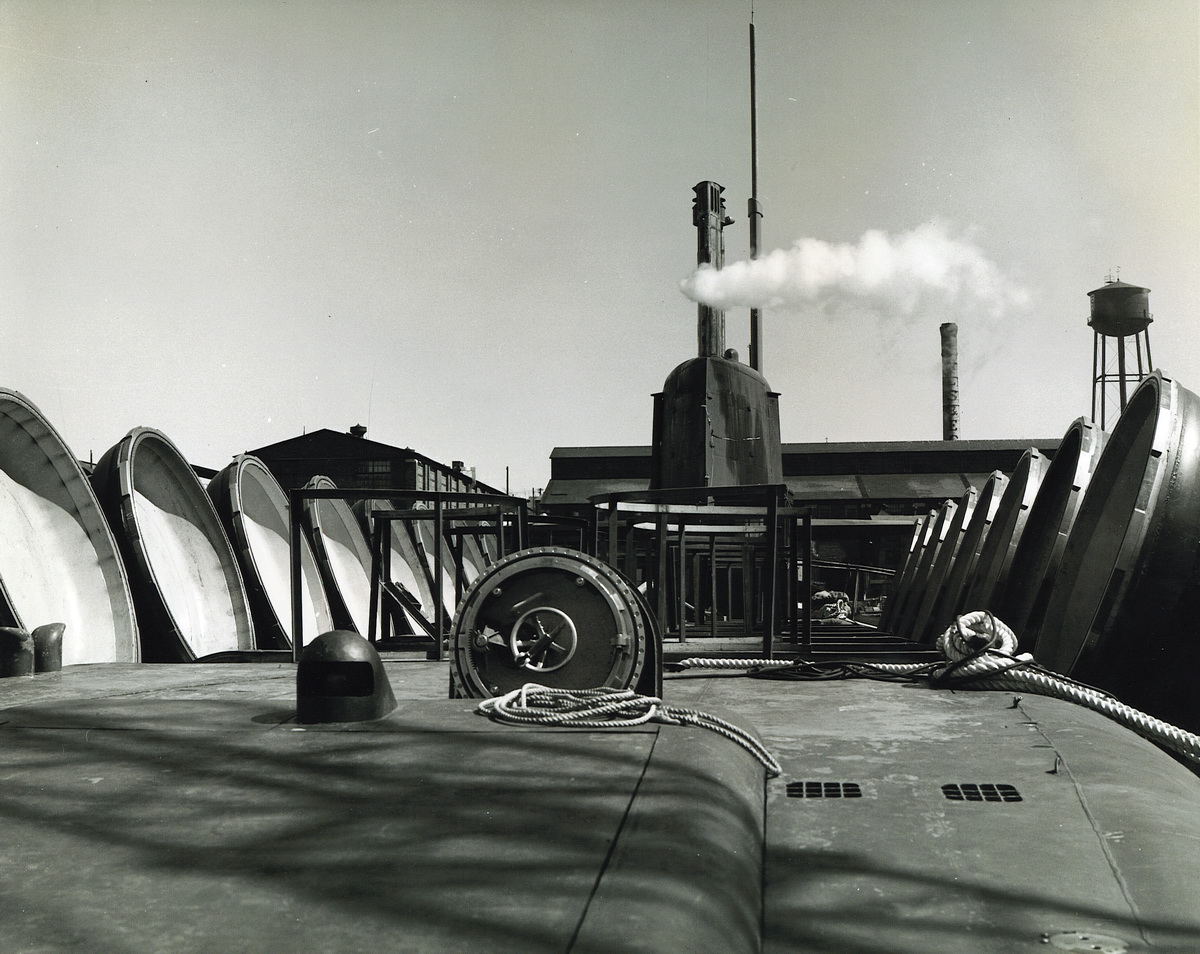
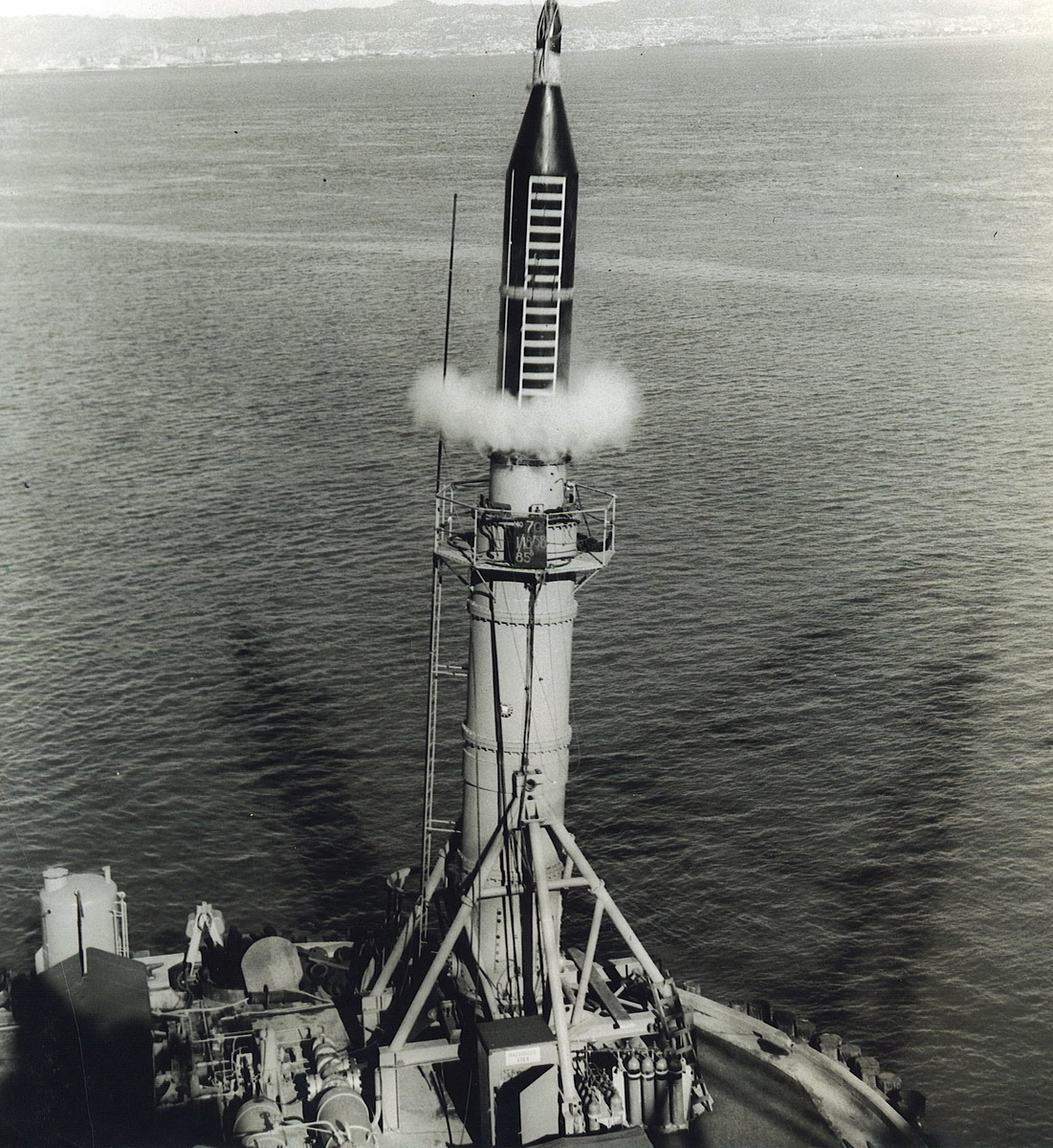
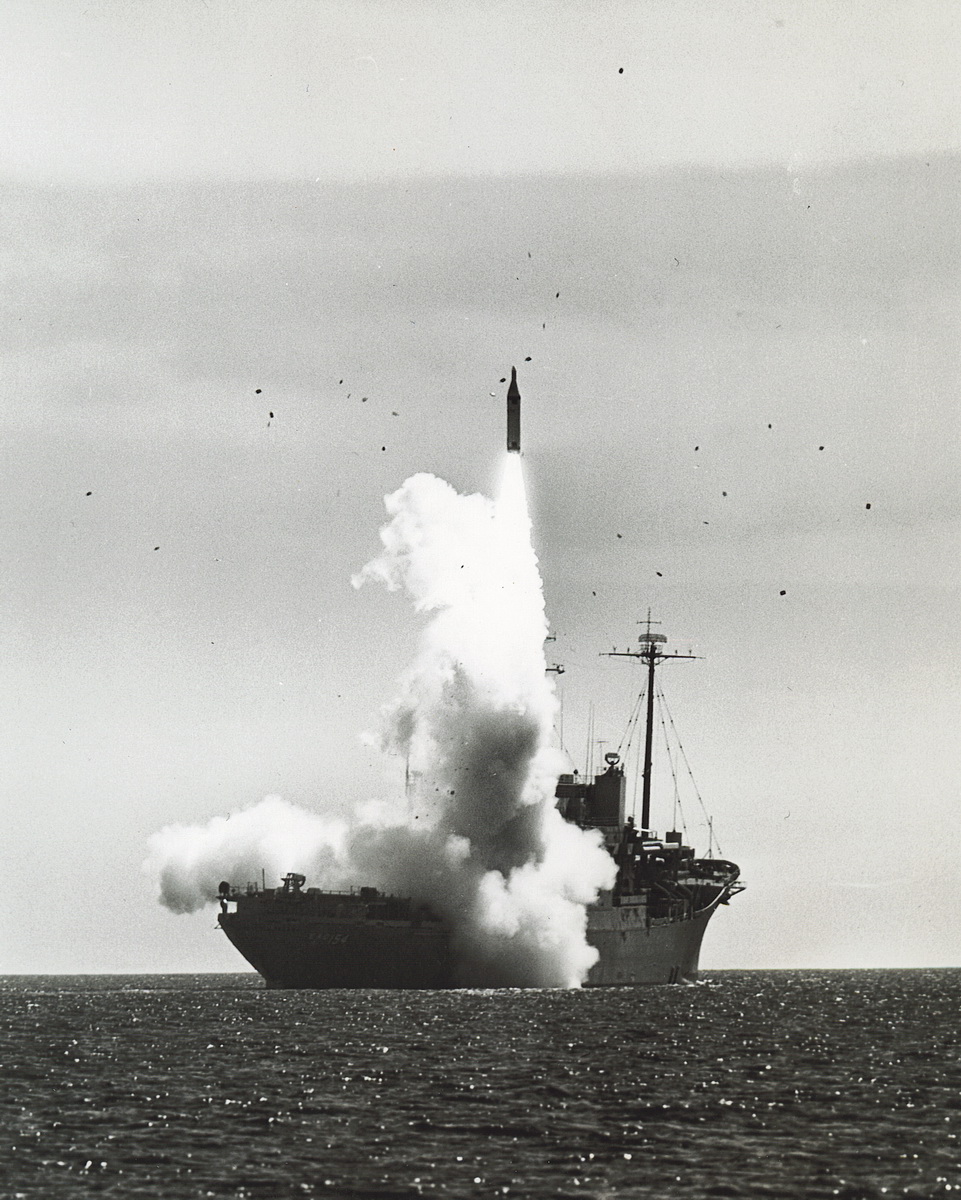
В июне 1957 года было решено приступить к отработке "минометного" пуска из надводного положения массо-габаритных макетов ракет из прототипа ШПУ,разработанного фирмой Westinghouse. Прототип получил название "Peashooter" (см. фото), бросковые испытания проводились на военно-морской верфи в Сан-Франциско. После их успешного окончания было решено приступить к отработке подводного старта, которая выполнялась на прототипе "Pop-Up" (см. фото), расположенном на военно-морском испытательном полигоне вооружений, расположенном вблизи острова Сан-Клементе, Калифорния. Первое бросковое испытание было выполнено в марте 1958 года. В сентябре 1958 года на Восточном испытательном полигоне начались летные испытания ракеты (см. фото), получившей обозначение UGM-27A "Polaris A-1". Первые пуски закончились неудачно. 20 апреля 1959 года очередной (пятый по счету) старт прошел успешно. Весь год ушел на отработку систем ракеты и головной части. Поскольку штатный носитель ракет еще не был готов, то к надводным пускам ракет решено было приступить с борта специально оборудованного судна Observation Island, в 1959-1960 гг. было выполнено 6 пусков (см. фото).

Завершалась программа пусками с борта атомной подводной ракетной лодки "George Washington", переданной флоту в этом же году.
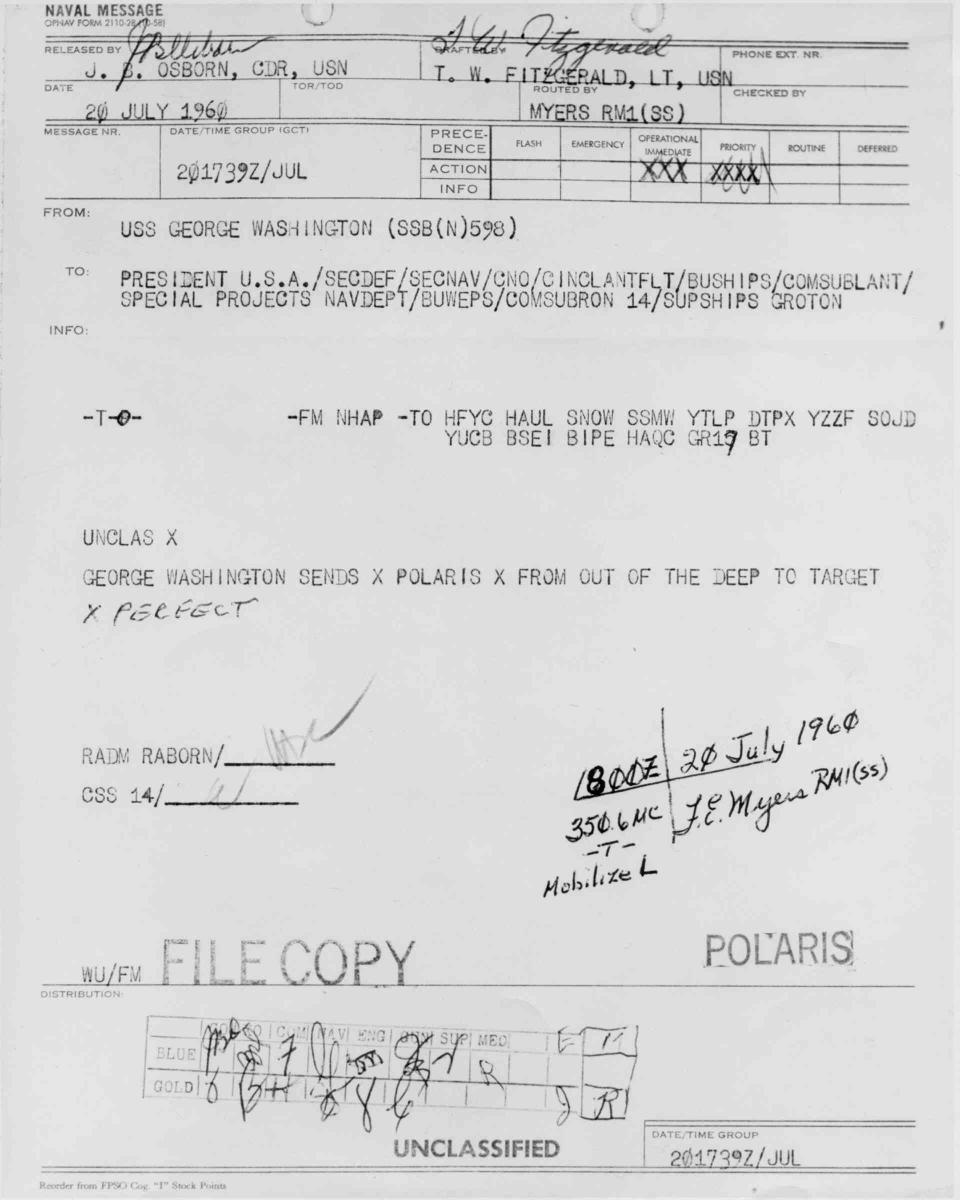
20 июля 1960 года с борта данной ПЛАРБ впервые в мире был выполнен успешный пуск баллистической ракеты с борта лодки, находившейся в это время в подводном положении вблизи мыса Канаверал, штат Флорида (см. фото). Спустя менее двух часов был произведен успешный пуск второй ракеты (см. фото). Сообщение об этом (см. фото) прямо с борта лодки было немедленно передано президенту США Д. Эйзенхауэру и было лаконичным "Джордж Вашингтон запускает "Polaris" из глубины в цель. Без замечаний" . Всего в общей сложности было выполнено: с сентября 1958 г. по октябрь 1959 г. 17 испытательных пусков опытной ракеты АХ (5 успешно, 11 частично успешно), и с сентября 1959 г. по ноябрь 1960 г. 40 испытательных пусков предсерийной ракеты А1Х (28 успешно, 11 частично успешно). Предсерийные ракеты отличались от опытных увеличенным запасом топлива на второй ступени и более высокоэнергетическим топливом. В октябре 1960 года ракетная система "Polaris A-1" была принята на вооружение.
Носителями этих ракет стали пять ПЛАРБ типа "Дж Вашингтон". На вооружении БРПЛ UGM-27A "Polaris A-1" состояли всего пять лет до середины 60-х годов. Снятие ракет с боевого дежурства началось в июне 1964 г. и окончилось в октябре 1965 г.
Несомненно, стоит упомянуть и о различных испытательных программах, в которых принимала участие ракета Polaris A-1. Первой из них стала отработка принципа управления вектором тяги за счет впрыска газа в закритическую часть сопла – именно такой метод планировалось применять на создававшейся в ту пору новейшей БРПЛ Polaris A-3. С этой целью в сентябре и декабре 1961 г. было выполнено 2 пуска ракеты А1Х с нештатной экспериментальной второй ступенью. В первом случае для впрыска использовалась смесь фреона и азота. По результатам пуска от азота было решено отказаться, а количество оставшегося фреона – уменьшить на 2/3. Оба пуска прошли успешно и т.о. дорога для нового принципа управления вектором тяги была открыта. Упомянутые пуски не входили в упомянутый выше общий зачет пусков ракеты А1Х.
Второй стала программа ISEP (Interservice Signature Experiments Program), основной целью которой являлось совместное – ВМС и ВВС, - изучение всех аспектов, связанных с детектированием боевых блоков ракет средствами СПРН и ПРО вероятного противника. Пуски снятых с вооружения ракет Polaris A-1 производились с судна Observation Island в направления атолла Кваджалейн. Всего в 1967 – 1968 гг. было выполнено 6 пусков. Запущенные ракеты отличались от штатных наличием специального переходного отсека, позволявшего использовать боевой блок Mk2 от ракеты Polaris A-3. Все пуски прошли успешно.
Особняком в карьере ракеты Polaris A-1 стоит успешное участие в мае 1962 г. в уникальном эксперименте - операции "Frigate Bird", являвшейся частью крупномасштабной серии американских испытаний "Dominic". В ходе нее атомный ракетоносец "Ethan Allen" запустил из подводного положения БРПЛ "Polaris-A1" в штатном снаряжении с термоядерной БЧ W-47 мощностью 600кт. Запуск был осуществлен из акватории Тихого Океана по району острова Рождества и закончился подрывом боеприпаса на высоте около 3 км в расчетной точке (см. фото).

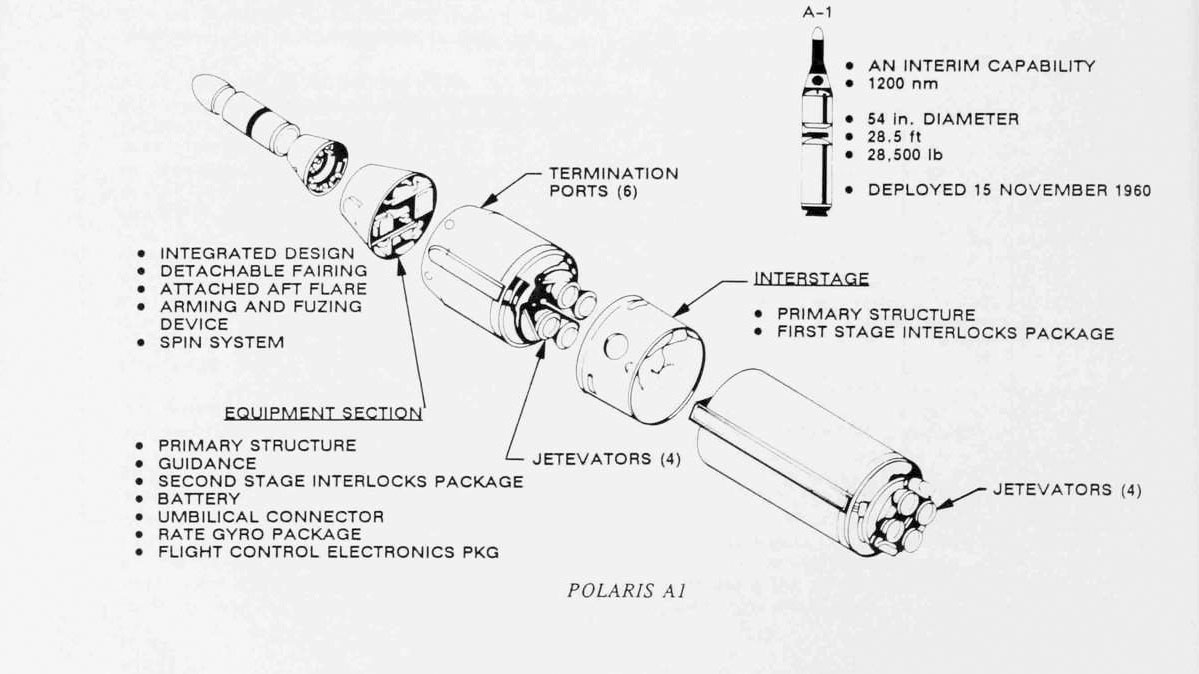
БРПЛ UGM-27A - двухступенчатая ракета с последовательным расположением ступеней (см. схему). Сварной корпус ракеты изготовлен из высокопрочной ванадиевой нержавеющей жароустойчивой стали АМЗ-256 с пределом текучести 160-170 кг/мм2.
В качестве двигателей для обеих ступеней ракеты использованы РДТТ. Двигатель первой ступени с тягой 45 т работает на полиуретане с присадкой алюминия и перхлората аммония (топливо ANP 2639). Присадка алюминия применяется для увеличения стабильности горения топлива и повышения удельного импульса до 245-250 кг*сек/кг (теоретический импульс 266 кг*сек/кг). Температура в камере двигателя первой ступени достигает 2700° С. Двигатель второй ступени имеет тягу 9 т (по другим данным - 4 т) и работает на полиуретане в смеси с сополимером полибутадиена и акриловой кислоты (топливо ANP 2673 на ракетах АХ, и ANP 2655 на ракетах А1Х и серийных А1P), имеет устройство отсечки тяги, что позволяет достигать различных дальностей полета. Заряд в РДТТ каждой ступени имеет внутреннюю полость в виде шестилучевой звезды, проходящей по продольной оси топливного заряда.
Каждый двигатель снабжен четырьмя соплами. Для управления вектором тяги двигателя на обеих ступенях ракеты применены кольцевые дефлекторы, установленные на каждом из сопел и сочлененные с соответствующими гидроприводами. Испытания показали высокую эффективность этого типа рулевого устройства и, в частности, возможность вывода ракеты с его помощью на траекторию даже при отклонении ракеты по вертикали в момент включения двигателя первой ступени на 40°. Двигатели включаются электромеханическим приспособлением и мощным запалом, при этом хвостовые пробки сопел, предохраняющие двигатели от попадания воды при подводном ходе ракеты, выталкиваются давлением рабочих газов, выделившихся в момент включения двигателя. Специальными опытами было установлено, что серийный двигатель ракеты "Поларис" нормально срабатывает после 1,5-годичного хранения на складе в специальном контейнере с микроклиматом штатной пусковой шахты подводной лодки.
Ракета оснащена отделяющейся в полете моноблочной головной частью W-47 мощностью 600 кт.
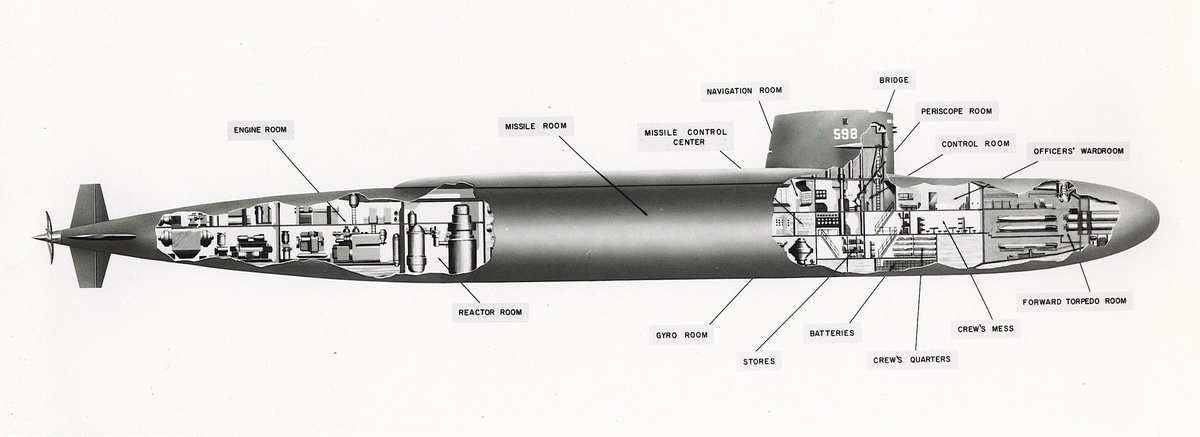
Для хранения и пуска ракет подводная лодка-ракетоносец имеет 16 пусковых шахт (см.описание), расположенных в средней части корпуса корабля. Крышки шахт, выступающие за пределы прочного корпуса, закрыты легкой обтекаемой надстройкой, длина которой на подводных лодках типа "Джордж Вашингтон" (см. схему) составляет 40 м.
Перед пуском ракеты давление в пусковой шахте выравнивается с забортным, после чего открывается прочная крышка шахты и доступ забортной воде преграждает лишь сравнительно тонкая пластикатовая диафрагма, расположенная под прочной крышкой шахты. Затем под обтюратор ракеты через систему клапанов подается сжатый воздух по строго определенному графику, точно выдерживаемому специальной автоматической аппаратурой, что обеспечивает заданный режим движения ракеты в шахте. При движении вверх ракета разрывает диафрагму, и забортная вода свободно поступает в шахту. Специальный автомат системы замещения обеспечивает продувку водяного балласта для компенсации избытка в весе, возникающего при заполнении шахты водой. После пуска ракеты прочная крышка шахты автоматически закрывается и находящаяся в шахте забортная вода сливается в специальную цистерну, размещенную внутри лодки.
Стартовое ускорение ракеты около 10 g при скорости выхода из шахты 45 м/сек и отрицательном ускорении самой подводной лодки приблизительно 0.02 g. Установлено, что подобное ускорение движения ракеты не оказывает сколько-нибудь существенного воздействия на бортовую аппаратуру, чувствительные механизмы и устройства ракеты.

После неуправляемого движения в толще воды ракета выходит на поверхность со скоростью около 50 м/с. Двигатель первой ступени автоматически включается в работу при нахождении ракеты на высоте 10 м от поверхности воды. На высоте около 20000 м он отделяется от ракеты, и в тот же момент производится автоматическое включение в работу двигателя второй ступени. Отделение второй ступени от боевой части ракеты и остановка двигателей происходят по команде от инерциальной системы наведения ракеты в заданной расчетной точке траектории.Интервал между пусками ракет до 1 мин.
Полет ракеты осуществляется по заранее заданной программе-траектории без какой-либо последующей корректировки с подводной лодки-ракетоносца, что предъявляет высокие требования к системам навигационной привязки и наведения комплекса. Примененная в комплексе автономная инерциальная система управления Mk I обеспечивает вывод ракеты на заданную траекторию, стабилизацию ее полета и выключение двигателя второй ступени ракеты при достижении заданной начальной скорости. Ее бортовая аппаратура расположена в приборном отсеке, который находится в средней части корпуса ракеты. Здесь размещаются стабилизированная платформа с акселерометрами, программный автомат управления полетом, блок вспомогательной электроаппаратуры, состоящий в основном из сервоусилителей и серводвигателей, цифровая счетно-решающая машина, источники питания и другие приборы. Вес бортовой аппаратуры наведения около 90 кг.
Для обеспечения контроля за техническим состоянием ракет и объективной оценки возможности их боевого использования на подводной лодке установлена специальная автоматическая система ОАТ1СО, распределительный щит которой обслуживает все блоки каждой из 16 ракет и может выполнять следующие операции:
- непрерывную проверку всех основных блоков ракеты с момента ее погрузки на корабль;
- периодическую экспериментальную проверку систем пуска и управления ракетой,
- полную проверку узлов ракета в период предстартовой подготовки.
Система ОАТ1СО состоит из программного блока со считывающим устройством, системы развертки, блока переключения программ, селектора, генератора тактовых импульсов, блока сравнения и блока индикаторов с печатающим устройством.
Перед стартом ракеты бортовая аппаратура подключается к корабельной системе приборов управления ракетной стрельбой (ПУРС) типа Мк-80, примененной впервые на одиннадцати подводных лодках типа "Джордж Вашингтон" и "Итэн Аллен". При этом в аппаратуру управления начинают непрерывно поступать данные, задающие координаты траектории и величину скорости полета ракеты в конце активного участка. Одновременно производится ориентация и раскрутка гироскопов и т.д.
Аппаратура ПУРС состоит из вычислительной машины с блоками памяти, хранящими информацию о возможных целях, и оптико-электрического устройства, служащего для контроля ориентации стабилизированной платформы.
С помощью вычислительной машины ПУРС решаются следующие основные задачи:
- рассчитывается траектория полета ракеты;
- определяется местная вертикаль и производится ориентация стабилизированной платформы бортовой аппаратуры ракеты; в бортовую систему управления вводятся величины необходимой скорости полета ракеты в конце активного участка траектории;
- фиксируются отклонения масштабных коэффициентов акселерометра;
- осуществляется непрерывный контроль за бортовой аппаратурой ПУРС и готовностью ракеты к старту.
Бортовая система ПУРС связана с навигационным комплексом SINS , от которого поступают данные о текущих координатах самого корабля и других параметрах, характеризующих его движение, а также сведения о положениях истинного меридиана и самого корабля относительно вертикали во время качки.
В навигационном посту ракетной подводной лодки размещаются следующие узлы и устройства:
- три комплекта системы SINS, смонтированные на стабилизированной платформе;
- стабилизированный перископ для использования в целях астронавигации из подводного положения;
- радионавигационная система;
- две специальные вычислительные машины типа "Навдак"
Оптическая система автоматического слежения за звездами имеет свою аналого-цифровую вычислительную машину "Стардак", которая служит для выработки данных, обеспечивающих стабилизацию системы. "Стардак" получает и перерабатывает исходные данные, характеризующие движение подводной лодки, и в результате перископ астронавигационной системы оказывается постоянно наведенным на ту или иную звезду, выбранную в качестве ориентира. Кроме того, с помощью машин "Стардак" вычисляются координаты самого корабля, которые затем передаются в другую вычислительную машину типа "Навдак".
Все три комплекта навигационной системы SINS работают независимо и параллельно. Их одновременное применение позволяет свести к минимуму ошибки в определении истинного местоположения корабля, поскольку поступающие с их выходов данные взаимно корректируют друг друга. Данные от радионавигационной системы и перископов также поступают на вход вычислительной машины, а данные о целях заранее вводятся в блоки-памяти вычислительной машины системы управления полетом ракеты. Таким образом, данные, вырабатываемые всеми элементами системы управления, непрерывно сравниваются и анализируются. В случае появления недопустимого по величине отклонения того или иного параметра по сравнению с заданным в работу включается вычислительная машина "Навдак", вычисляющая поправку и вводящая исправленное значение данного параметра в соответствующее устройство системы управления. Навигационная система комплекс включает также успокоители качки подводной лодки с гироскопом весом около 23 т.

Учитывая значение, чрезвычайную сложность и стоимость комплекса "Polaris A-1", большое внимание было уделено разработке средств транспортировки комплекса. Для транспортировки ракет самолетами созданы специальные ударостойкие герметичные контейнеры.
Отработаны также средства транспортировки ракет по железной дороге на открытых платформах и по шоссейным дорогам с помощью специальных автомашин, а для транспортировки ракет по водным путям сконструирована баржа катамаранного типа со специальным ангаром, способная перевозить ракеты общим весом до 200 т.
Ракеты и боеголовки к ним к месту стоянки подводных лодок-ракетоносцев доставляются в контейнерах, которые затем вместе с ракетами устанавливаются подъемным краном в пусковые шахты подводной лодки. Ракеты в контейнерах могут также грузиться на специальные транспортные суда или плавбазы (например, типа "Хэнли") для доставки на подводные лодки, находящиеся в открытом море.
| Число ступеней | 2 |
| Стартовый вес, т | 12.7 |
| Длина ракеты, м | 8.53 |
| Диаметр ракеты, м | 1.37 |
| Дальность полёта, км | 2220 |
| Круговое вероятное отклонение, м | 1800 |
| Давление в камере двигателя 1 ступени ,кг/см2 | 70 |
| Давление в камере двигателя 2 ступени., кг/см2 | 35 |
| Тяга двигателя 1ступени, т | 45 |
| Тяга двигателя 2 ступени, т | 9 (4) |
| Время работы двигателя 1ступени, с | 54 |
| Время работы двигателя 2ступени, с | 70 |
| Максимальная скорость полета ракеты, М | 10 |
- Пронин Л.И. "Ракеты для космических исследований".
- Морозов Н.И. "Баллистические ракеты стратегического назначения". - М.: Воениздат, 1974









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}