Баллистическая ракета UGM-27B "Polaris A-2" изначально создавалась с целью отработки перспективных технологий строительства БРПЛ. Она предназначалась для оснащения атомных подводных ракетоносцев - класса "Ethan Allen". Это были первые в США атомные субмарины, специально построенные для нанесения ракетных ударов из-под воды. Несмотря на внешнее сходство, конструктивно они были значительно более совершенными по сравнению с предшественниками - ПЛАРБ класса "George Washington".
Разработка UGM-27B "Polaris A-2" была поручена корпорации "Lockheed Missile Systems". Перед создателями новой ракеты изначально ставилась задача улучшить ее тактико-технические характеристики ракеты при условии максимальной преемственности с БРПЛ "Polaris-A1"- это позволяло существенно снизить технические риски при разработке нового комплекса.
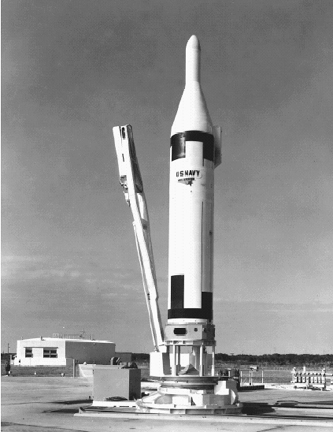
Новый комплекс вышел на испытания в ноябре 1960 года на Восточном ракетном полигоне (Eastern Missile Range), авиабаза Патрик, Флорида. Запуски поначалу осуществлялись с наземных стартовых площадок LC-25A и LC-29A (см. фото). К декабрю 1961 года основная испытательная программа была завершена – было запущено 20 предсерийных ракет А2Х, 15 пусков были успешными, 3 – частично успешными. В том же году испытания и учебно-боевые запуски стали проводиться и из акватории Западного ракетного полигона ("Western Missile Range"), авиабаза Ванденберг, Калифорния. Всего было выполнено 32 испытательных запуска БРПЛ "Polaris-A2", из них 9 неудачных. Всего за время испытаний и активной эксплуатации БРПЛ "Polaris-A2" с ноября 1960 года по ноябрь 1971 года было выполнено 227 запусков, из которых неудачными являлись 15.
Впервые на боевое патрулирование с новой серийной ракетой А2Р ПЛАРБ "Ethan Allen" вышла в июне 1962 года.
Все ракетоносцы класса "Ethan Allen" в период с конца 1962 до лета 1963 года были введены в состав 14-й эскадры (база - Холи-Лох, Великобритания). В качестве районов боевого патрулирования была выбрана акватория Средиземного моря. Учитывая дальность ракетной стрельбы, можно сделать вывод, что в качестве возможных целей для этих ПЛАРБ были выбраны стратегически важные площадные объекты Украинской ССР, Кавказа, Южного Урала и Средней Азии.
Первоначальные планы по развертыванию ракет UGM-27B только на пяти ракетоносцах класса "Ethan Allen" были скорректированы в сторону существенного расширения - новые ракеты были развернуты и на первых восьми построенных (из 31) атомных подводных ракетоносцах класса "Lafayette". Это было связано с существенным отставанием по срокам с подготовкой основной ракеты для данного класса кораблей - новейшей БРПЛ "Polaris-A3"". Чтобы не затягивать с введением ракетоносцев в строй, было решено оснастить их менее современной, но уже отработанной БРПЛ. Ракета "Polaris-A2" начала сниматься с вооружения в январе 1968 г., но в связи с принятием на вооружение флота новейших БРПЛ "Poseidon-C3" процесс расставания со старой БРПЛ существенно затянулся и последний ракетоносец, оснащенный ею – ПЛАРБ "John Marshall", - выгрузил свои ракеты из шахт только в ноябре 1974 г.
Стоит отметить, что ракета "Polaris-A2" активно использовалась, подобно своей предшественнице "Polaris-A1", и в различного рода испытательных программах. Первой из них стала программа отработки системы управления Mk II и материалов для боевого блока Mk2 создавшейся в тот момент перспективной БРПЛ "Polaris-A3". Всего было задействовано 8 ракет – на четырех ракетах А2G проходила испытания новая система управления, на двух ракетах A2M – материалы нового ББ, еще на двух A2MG испытывалось все вместе. Пуски проходили с ноября 1961 г. по декабрь 1962 г., 4 – успешно, 3 – частично успешно. В упомянутый выше общий зачет пусков ракеты А2Х они не входили.
В 1971 году, уже под занавес своей карьеры, БРПЛ "Polaris-A2" использовалась в качестве ракеты-мишени при отработке американской зональной системы ПРО "Safeguard" в рамках программы SSTTP (Safeguard System Test Target Program). Ракета "Polaris-A2" имитировала советские БРПЛ Р-21 и Р-27. Всего планировалось запустить 22 ракеты "Polaris-A2" в трех конфигурациях – со с штатным боевым блоком Mk1 и КСП ПРО PX-1 (5 штук), с боевым блоком Mk2 от ракеты "Polaris-A3" (5 штук) и с боевым блоком Mk2 и специальным адаптером APEX (Auxiliary Payload EXtension) в количестве 12 штук. Последняя конфигурация представляет особый интерес – переходник APEX содержал в себе разработанные для ВВС ложные цели. Позже в этот же переходник были дополнительно размещены калибровочные сферы из меди диаметром 38см, отстреливавшиеся и выводившиеся на отдельную траекторию, а к хвостовой части ББ некоторых ракет были прикреплены с помощью специальных привязей специальные надувные ложные цели RADs (Radar Augmentation Devices), также принадлежащие ВВС. Пуски планировалось проводить в область атолла Кваджалейн в Тихом Океане с борта судна Observation Island. В реальности программа, однако, приобрела намного более скромный вид – с апреля по декабрь 1971 года по данной программе было выполнено 4 запуска ракет только в конфигурации Mk2/APEX, 3 из которых были дополнительно укомплектованы медными сферами. Также на некоторых ракетах были применены ложные цели RADs. Все пуски были оценены как успешные.
Баллистическая ракета UGM-27B частично унаследовала конструктивные особенности своей предшественницы - БРПЛ UGM-27A "Polaris-A1". Ракета выполнена двухступенчатой с последовательным соединением ступеней.
Маршевый РДТТ первой ступени A2P, традиционно разрабатывавшийся фирмой "Aerojet General", имел четыре поворотных сопла. Сопла изготавливались из алюминиевого сплава со специальными покрытиями. Для управления вектором тяги двигателя на первой ступени ракеты применены кольцевые дефлекторы, установленные на каждом из сопел и сочлененные с соответствующими гидроприводами (эта система доказала свою жизнеспособность на БРПЛ UGM-27A). Испытания показали высокую эффективность этого типа рулевого устройства и, в частности, возможность вывода ракеты на траекторию даже при значительном отклонении по вертикали в момент включения двигателя первой ступени. Система управления позволяла управлять ракетой по каналам тангажа, рыскания и крена. Двигатель включался электромеханическим приспособлением и мощным запалом, при этом заглушки сопел, предохранявшие двигатель от попадания воды при подводном ходе ракеты, выталкивались давлением рабочих газов в момент включения двигателя. По сравнению с первой ступенью A1P ракеты UGM-27A ступень A2P была удлинена за счет специальной вставки длиной 7.62м. Как и ступень A1P, ступень A2P выполнялась сварной из высокопрочной ванадиевой нержавеющей жароустойчивой стали АМЗ-256 с пределом текучести 160-170 кг/мм2. Топливо двигателя первой ступени осталось в целом практически неизменным - полиуретан с присадкой алюминия и перхлората аммония (топливо ANP 2639AF). Присадка алюминия применяется для увеличения стабильности горения топлива и повышения удельного импульса.
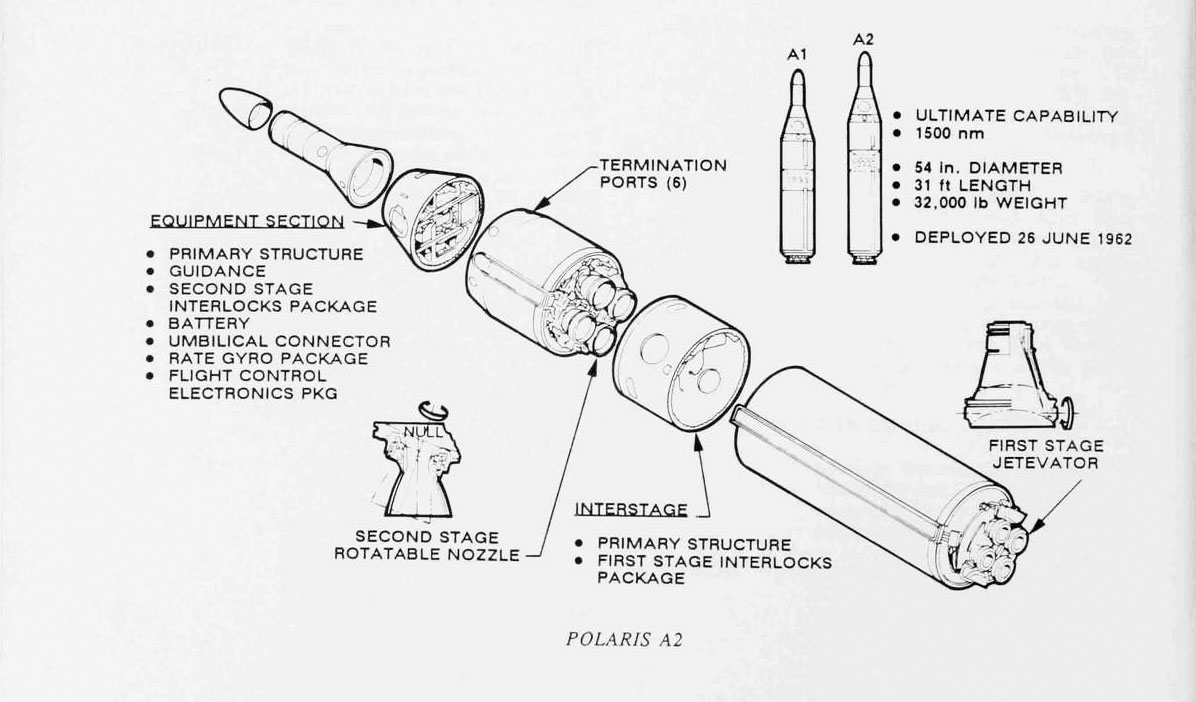
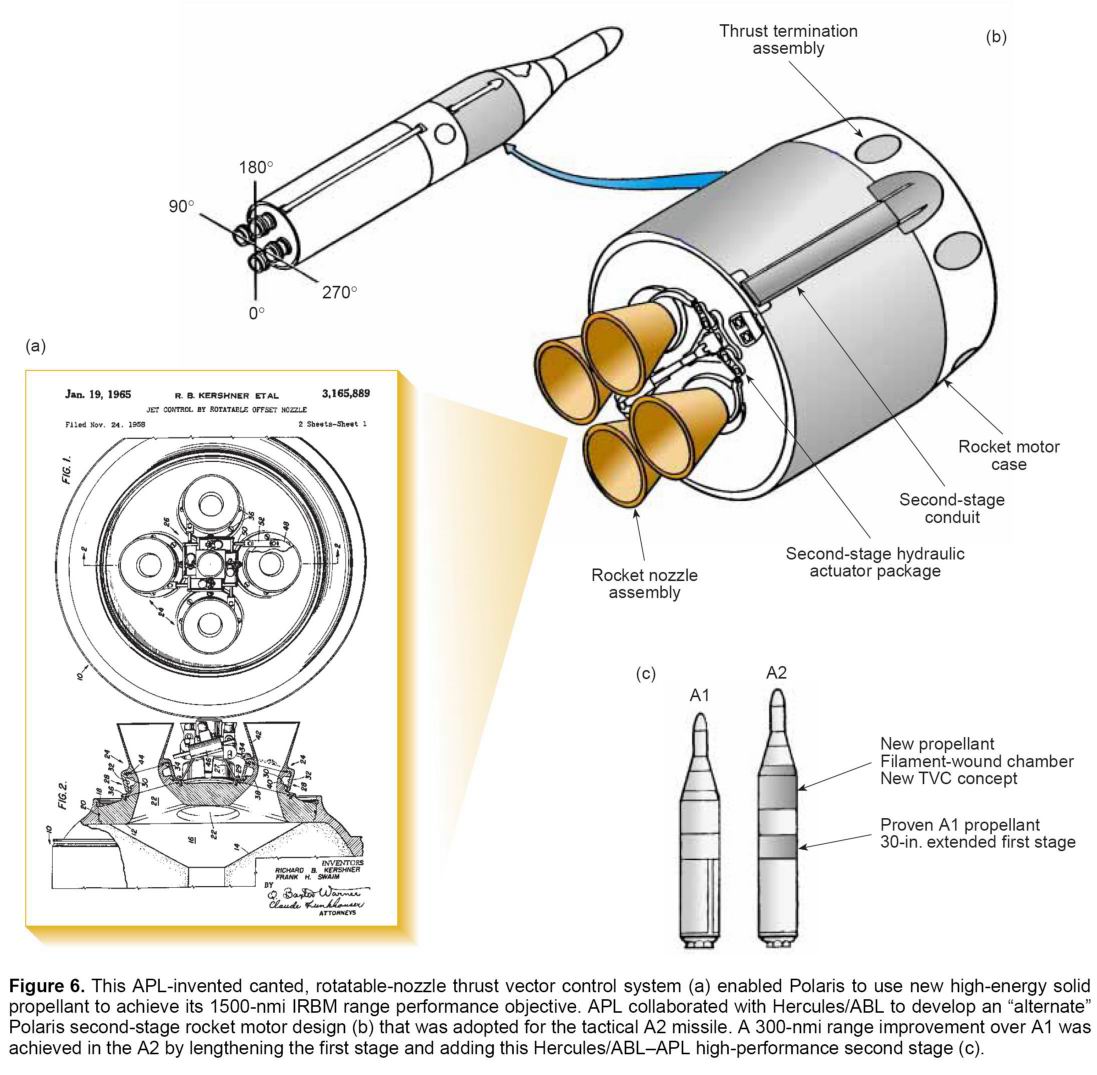
На ракетном двигателе второй ступени, разработанном фирмой "Hercules Powder" при широком участии Отделения систем "Polaris" Лаборатории прикладной физики Университета Джонса Хопкинса ("The Johns Hopkins University’s Applied Physics Laboratory", "Polaris Division"), Аллеганской Лаборатории баллистики ("Allegany Ballistics Laboratory") и корпорации "Cleveland Pneumatic Industries", установили четыре поворотных сопла, также выполненных из алюминиевого сплава со специальными покрытиями. Механизм создания управляющих усилий для поворота сопел был усовершенствован по сравнению с аналогичным механизмом первой ступени, что позволило снизить инертную массу ступени и упростить ее с одновременным повышением надежности и эффективности (см. схему). Данная система позволяла уверенно управлять ракетой на участке работы второй ступени по всем каналам. Основное новшество, примененное на второй маршевой ступени - конструкционный материл корпуса ступени. Впервые в мире удалось создать маршевую ступень БРПЛ из органических материалов - путем намотки нитей из стекловолокна с пропиткой эпоксидной композицией. Такой шаг позволил существенно снизить инертную массу второй ступени. Сложной технической задачей оказалось размещение в передней части корпуса второй ступени узла отсечки тяги с шестью отверстиями, прорубаемыми детонирующими удлиненными зарядами в силовой конструкции ступени, выполненной из органических материалов. Устройство отсечки тяги маршевого двигателя второй ступени позволяло варьировать дальность полета ракеты. На второй ступени было применено более совершенное, смесевое модифицированное двухосновное твердое топливо DDT-70.
Заряд в РДТТ каждой ступени имеет внутреннюю полость в виде звезды, проходящей по продольной оси топливного заряда – на первой ступени шестилучевой, на второй - двенадцатилучевой.
Ступени соединялись с помощью переходника из алюминиевого сплава. Для разделения маршевых ступеней использовался огневой способ. В передней части переходника крепился заряд, срабатывавший в момент разделения. Такой способ использовался и используется практически на всех американских БРПЛ.

Полет ракеты после выхода из пусковой шахты ПЛАРБ осуществлялся по заранее заданной программе без корректировки с подводной лодки-ракетоносца, что предъявляло высокие требования к системам навигационной привязки и наведения комплекса. Примененная в комплексе автономная инерциальная система управления обеспечивала вывод ракеты на заданную траекторию, стабилизацию ее полета и выключение двигателя второй ступени ракеты при достижении заданной скорости. Аппаратура системы управления расположена в неотделяемом приборном отсеке, который находился в передней части корпуса второй маршевой ступени ракеты. Здесь размещались платформа с акселерометрами и блоком высокоскоростных гироскопов, программный автомат управления полетом, блок вспомогательной электроаппаратуры, вычислительная машина, источники питания и т.д. Система управления была разработана фирмами "General Electric" и "Hughes" с участием Массачусетского Технологического Института ("Massachusetts Institute of Technology"). По сравнению с предшественницей система управления БРПЛ "Polaris-A2" была несколько модифицирована, что позволило сохранить точность стрельбы БРПЛ "Polaris-A1" при одновременном увеличении дальности стрельбы новой БРПЛ.
Ракета была оснащена отделяющейся в полете моноблочной головной частью, состоявшей из боевого блока Mk1 (модификация B) и термоядерной боевой части W-47 mod.2 мощностью 600 кт (или, как вариант, более тяжелой термоядерной боевой части W-47 mod.3 мощностью до 800 кт, а по некоторым данным – до 1 Мт). Допускалась в случае необходимости и установка взамен штатной головной части ГЧ от ракеты UGM-27A - боевого блока Mk1 (модификация A) и термоядерной боевой части W-47 mod.1 мощностью 600 кт. Боевое снаряжение БРПЛ "Polaris-A2" позволяло наносить удары по слабозащищенным площадным целям (прежде всего, крупным городам, что укладывалось в тогдашнюю американскую доктрину «взаимного гарантированного уничтожения»).
Кроме того, данная БРПЛ стала исторически первой БРПЛ, получившей КСП ПРО. Программа по разработке комплекса, получившего название "PX-1", началась в ноябре 1961 г. и проводилась фирмой Lockheed. В июле – декабре 1962 года было выполнено 12 испытательных запусков модифицированной ракеты А2Т с комплексом на борту – 7 пусков были оценены как успешные, что дало право создателям говорить об успешном завершении программы испытаний. В период с июля 1963 по июль 1964 года ВМС США получили 221 комплект "PX-1" для развертывания на БРПЛ "Polaris A-2", уже принятой к тому времени на вооружение.
По опубликованным сведениям, комплекс "PX-1"состоял из:
- 6 легких ложных целей и двух контейнеров для дипольных отражателей, размещенных на специальном переходнике между ББ и отсеком СУ длиной 11,5 см, отстрел ЛЦ и формирование полей дипольных отражателей велось после отделения ББ, после чего и переходник отстреливался от второй ступени ракеты, сам становясь тяжелой ложной целью;
- размещенных на донной части ББ 2 генераторов активных помех и одного контейнера для дипольных отражателей, отстрел которых производился после окончания работы специально установленных на ББ РДТТ ориентации блока в положение с наименьшим ЭПР по отношению к радиолокационному полю РЛС СПРН и ПРО.
Также частью КСП ПРО являлась система увода второй ступени в сторону от траектории полета боевого оснащения, чтобы имеющая значительную ЭПР и следующая на небольшом удалении от боевого оснащения ступень не могла служить прицельной точкой для ракет системы ПРО. Согласно оценкам американских специалистов, данный КСП ПРО мог надежно защитить ББ от детектирования вплоть до высоты 30,5 км.
Однако массового развертывания комплекса "PX-1"так и не произошло - им был оснащен лишь боекомплект БРПЛ одной ПЛАРБ из числа носителей ракет "Polaris A-2" (всего же данные БРПЛ были развернуты на 13 ПЛАРБ).
Американские источники называют следующие причины случившегося:
- ненадежность генераторов активных помех;
- возникшие проблемы с обучением персонала и обслуживанием ракет;
- снижение дальности стрельбы ракет, оснащенных КСП ПРО;
- переоценка американцами уровня развертывания работ по ПРО в СССР (к последнему удачно "приложили руку" органы государственной безопасности СССР,успешно осуществившие масштабную дезинформацию вероятного противника), в силу чего к моменту начала развертывания КСП ПРО "PX-1" американцы уже сочли его "не соответствующим уровню угроз текущего момента".
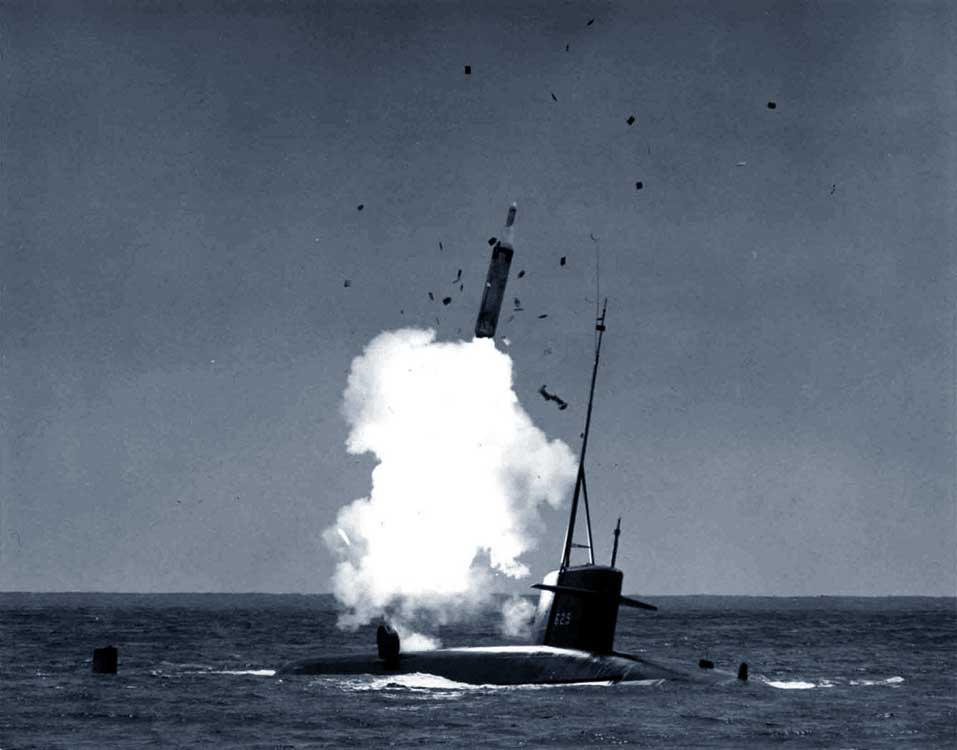
В ракетном отсеке каждой ПЛАРБ, оснащенной ракетами "Polaris-A2", были установлены 16 пусковых установок. Каждая из них имела классическую конструкцию - состояла из шахты, крышки с гидравлическим приводом, уплотнения крышки, стального пускового стакана, мембраны и оборудования подачи низкотемпературной парогазовой смеси, вырабатывавшейся индивидуальным газогенератором для каждой ПУ. Система обеспечивает выброс БРПЛ с глубины не более 30-40 м (в зависимости от класса ПЛАРБ) на высоту около 10 м над поверхностью воды. Все 16 ракет могли быть запущены за 16 минут. Метод старта БРПЛ - подводный, однако проводились успешные эксперименты по проведению запуска БРПЛ UGM-27B и из надводного положения.
| Длина ракеты, м | 9.45 |
| Диаметр ракеты, м | 1.37 |
| Масса в снаряженном состоянии, т | 13.6 |
| Масса сборки ББ+ГЧ, т | 0.50 |
| Мощность ГЧ, Мт | 0.8 |
| Дальность стрельбы максимальная, км | 2800 |
| Круговое вероятное отклонение, м | 3700 |
| Тяга двигателя 1 ступени на уровне моря, кН | 311 |
| Высота апогея траектории ГЧ, км | 1000 |
- Johns Hopkins APL Technical Digest, Volume 19, Number 4, P.375-387, 1998
- А.А. Шумилин «Авиационно-космические системы США». Москва, «Вече», 2005.
- www.lockheedmartin.com
- www.astronautix.com
- www.nuclearweaponarchive.org
- www.globalsecurity.org
- www.fas.org
- www.arms.ru
- www.militaryparitet.com
- www.orugie.ru
- www.dodmedia.osd.mil
- www.navsource.org









{kind=link}
{kind=link}